| |
 |
| |
|
 |
 |
|||||||||||
| 辻 宏之 |
||||||||||||
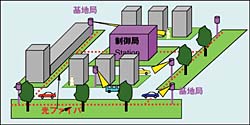
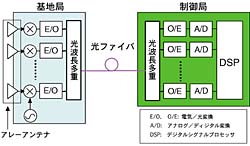
公園のベンチに座っていても、自動車に乗っていても電子メールのやり取りだけでなく、携帯電話の千倍の高速データ通信(数十Mbps以上)が可能になれば、自動車への高画質の動画像伝送やCD-ROM等が不要のナビゲーションシステムといったさまざまなアプリケーションが期待されます。ミリ波帯(※1)を使えばこのような広帯域伝送が可能であり、さらに装置の小型化・軽量化が期待できます。しかし、伝搬による信号の劣化が大きく、光のように直進性が強いため遮蔽に弱い等といった欠点があります。そこで私たちは、アレーアンテナ(※2)を基地局に採用し、アンテナの指向性をもたせ移動体にスポットライトを当てるように移動体の存在する方向に電波を集中させることにより、これらの問題を解決しようとしています。この方法では、不要な方向に電波を出さないようにできるため、建物等による反射波の干渉による信号の劣化を防ぐことも可能となります。これを実現するための重要な技術として移動する端末(移動体端末)の電波の到来方向角を実時間で正確に推定を行う追尾技術(移動体追尾技術)が必要になります。 今回、私たちの研究グループは住友電気工業株式会社の協力を得て、ミリ波帯における広帯域移動アクセスシステムの実現を目的とした移動体追尾技術の野外実証実験に成功しました。 【広帯域移動アクセスシステムの概要】 本システムは、移動体端末と、光ファイバーで接続されている基地局及び制御局で構成されています(図1)。ミリ波では、基地局と移動体端末間はお互いが見通せる範囲でしか通信できず、サービスエリアを確保するためには多くの基地局を設置しなくてはいけません。多くの基地局に高度な処理装置を設置するとコストの面で問題となるので各基地局の機能を簡単にする必要があります。本システムでは、基地局と制御局を光ファイバで接続し、各基地局には光の信号と電波の信号を相互に変換する機能のみを持たせ、変復調やアレーアンテナの制御などの複雑な処理は制御局で行うようにしました。機能の拡張やシステムの変更があった場合でも、制御局のみ変更すればよいといったメリットもあります。基地局と制御局の構成を図2に示します。基地局アレーアンテナの小型化・低価格化を実現するため、光波長分割多重技術(※3)を用いて、各素子アンテナでの送受信信号を多重化し1本の光ファイバでそれぞれ独立に制御局との間で伝送します。これにより、アレーアンテナの制御に必要な処理を制御局で行うことができ、基地局の構成が簡単になります。 制御局には、高速移動体を追尾する位置推定とアンテナビーム形成が行える信号処理装置(DSP)を設置しています。 【ミリ波帯移動体追尾実証実験】
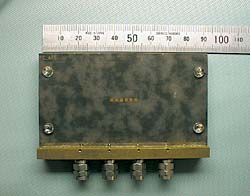
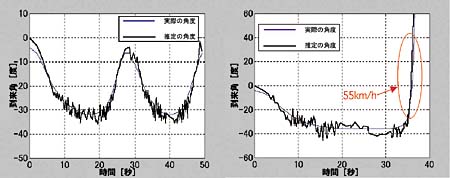
従来のアレーアンテナを用いた移動体追尾法の多くは、高速な移動体に対してはうまく信号到来方向推定ができなかったり、計算時間がかかりすぎて実時間の処理には不向きであったり等と多くの問題がありました。そこで移動体の位置と時間の関係を直線で近似する方法[1]を発展させ、精度を劣化させることなく少ない計算量で追尾できる新たな手法を開発しました。この結果、わずかな素子数のアンテナで、移動体端末が高速に移動しても正確に追尾することができるようになりました。 これらの移動体追尾技術を実証する実験を行いました。具体的には周波数59.5GHzの無変調波を放射しながら走行する移動体(自動車)の位置を基地局側で実時間で追尾しました。写真2は実験システムの概観で、左のクレーン車が基地局、右の車が送信機を積んだ移動局です。基地局には4.7m高の4素子のアレーアンテナが搭載されています。また制御局は基地局から離れたところに設置され光ファイバで基地局接続されています。図3に車が低速(時速約10km、左)で基地局の下から約20m離れた地点間を往復した場合と、低速で80m離れてから高速(時速約55km、右)で基地局の下方を通過したときの移動体方向の推定結果を示します。横軸は推定開始の時間を示し、縦軸は基地局から移動体を見たときの角度を示します。このとき基地局のアレーアンテナは真下から道路に沿って5.7m離れたところが0度となるように設置されています。角度が大きくなる(基地局より遠くなる)と受信信号が弱くなるため推定値に多少の変動が見られますが、角度が小さい場合(近い場合)は精度良く角度が推定されることがわかります。
ミリ波帯通信の課題である伝搬損失の補償と通信品質の確保を行う移動体追尾技術の実証実験を行いミリ波帯移動アクセス実現への第一歩を確立いたしました。今後は動画像や各種データの通信実験により本システムの有効性を示し、実用化へ向けて研究していく予定です。 (横須賀無線通信研究センター 第4研究チーム) (※1)ミリ波帯 30GHz~300GHzの周波数帯を指し、波長が1mm~10mmとミリメートル単位となるのでこの名前が付けられている。将来は加入者系無線アクセスシステムや超高速無線LAN、さらには自動車の衝突防止レーダ等への利用が期待されている周波数帯である。 (※2)アレーアンテナ 複数のアンテナ素子を直線や円形、平面に配列し、これを互いに接続して使用するアンテナをいう。各素子の振幅と位相を変化させ所望の指向性を実現する。 (※3)光波長分割多重技術 一本の光ファイバの中に波長の異なる多数の光波を多重して伝送する技術をいう。 参考文献 [1] Y. Okada, H. Tsuji, S. Yoshimoto, H. Kagiwada, and A. Sano, “Tracking Method of Moving Targets for Millimeter-Wave Multimedia Mobile Access Communications System,” Technical Report of IEICE, vol. RCS97, no. 194, pp. 83-88, 1997. |
||||||||||||
 | ||||||||||||
|
|
|

|
||||||||||
|
||||||||||||