-ETS-VIIにおけるアンテナ結合機構実験-
宇宙通信部 宇宙技術研究室
木村 真一
図1:技術試験衛星VII型
(ETS-VII、提供:宇宙開発事業団)1. はじめに
昨年11月に世界初の無人ロボット衛星・技術試験衛星VII型(以下ETS-VII、図1)が打ち上げられた。宇宙ロボットはこれまでスペースシャトルや宇宙ステーションミール等宇宙飛行士が手助けできる環境で使われた例はあるが、有人支援が受けられない環境で実験が行われるのは世界的に初めての試みである。通信総合研究所(以下CRL)では、このETS-VIIにおいて、将来の宇宙空間における大型アンテナ組立に必要な技術の実証と、そのために必要な宇宙ロボットの遠隔制御技術に関する知見を得る目的で、「アンテナ結合機構基礎実験」(AAM実験)を行う予定である。ここではその実験の概要について紹介することにする。
2. 軌道上における大型アンテナ組立について
大型アンテナを宇宙で実現する方法として、展開型、膨張型等が考えられているが、宇宙ロボティクスを応用した組立型アンテナ(図2)も、展開型、膨張型には無い特徴を持つ、一つの有効な方法であると考えられる。組立型アンテナは地上で加工した硬い部材で出来た分割鏡面を用いるため、展開型、膨張型に比べて鏡面精度が高く、高い周波数での利用において特に有効である。また組立作業を繰り返す事により、非常に大きなアンテナの構築や、段階的なアンテナ構築といった利用形態も考えられる。
図2:起動上での大型アンテナ組立
(想像図)
3. 実験装置の開発
CRLではこの実験に対して、ETS-VIIに搭載される「アンテナ結合機構基礎実験装置(AAM)」と、地上においてNASDAの宇宙ロボット制御系に接続し、地上からの遠隔操作を実現する「テレオペレーションシステム」の2つの実験装置を開発した。
3.1 アンテナ結合機構(AAM)
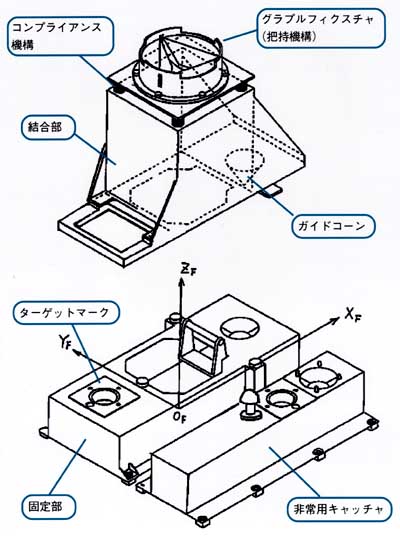
AAMは組立型アンテナの結合機構をモデル化したものであり、図3に示すような形状をした機構で、「結合部」は組立型アンテナのラッチ機構によって「固定部」と結合している。実験は「結合部」に取り付けられたグラプルフィクスチャと呼ばれる把持機構をロボットアームが把持し、ラッチを解除後、「結合部」を「固定部」から分離・移動・再結合することでアンテナの組立作業を模擬することにより行う。ここでの「結合部」と「固定部」組み付け作業を支援し、正確で確実な組立を実現するための機構として、(1)ターゲットマークによる視覚的誘導と(2)ガイドコーンによる機械的誘導が用意されている。ロボットアーム手先部に取り付けられた「手先カメラ」からターゲットマークを撮像すると、「結合部」と「固定部」の相対的な変位によって、異なった画像が得られる。この画像を解析することにより、ロボットアーム手先部と「固定部」の間の理想的な結合位置からのズレを自動的に計測し、正確な組み付け作業を実現することができる。更に、画像解析で吸収しきれない微小な変位や、振動等時間変動する変位は、「結合部」に取り付けられたガイドコーンとグラプルフィクスチャに取り付けられたバネ(コンプライアンス機構)が「結合部」を機構的に誘導し、正確で確実な組み付け作業を実現することが可能となっている。
図3:アンテナ結合機構(AAM)
3.2 遠隔操作システム
ETS-VIIは無人の宇宙機であるため、搭載されているロボットの操作は全て地上からの遠隔操作により行う必要がある。また、ETS-VIIは軌道高度約550kmを周回しており、データ中継衛星との衛星間通信回線を介して地上の遠隔操作システムと結ばれているが、1周回中に地上局と通信できる時間は約40分程度であり、機器の立ち上げや設定等の時間を考慮すると、1回の実験で利用できる時間は約20分と非常に短い。また、通信等による数秒程度の時間遅延が存在し、操作応答性が悪い。そのため、ロボットの操作は正確に・確実に・迅速に・時間遅れに伴う操作応答性の悪化をカバーしつつ・不測の事態に柔軟に対応できるように行わなければならない。これらを同時に満たすこと、特に非常に厳しい時間制約のもとで正確な操作を実現することは、遠隔制御技術として大きな課題である。 CRLでは、これらの問題点に対応しETS-VIIのロボットアームを操作する遠隔操作システムの開発を行った。CRLの遠隔操作システムは以下のような特徴を備えている。(1) 3次元形状シミュレータによるロボットコマンドの視覚的な検証
軌道上のロボットに対してコマンドを送信し動作させる場合、事前に十分に動作の安全性を確認する必要がある。本システムでは3次元形状シミュレータを備えており、動作プログラムの安全性を視覚的に確認し、また実験プログラム全体が実験者の意図した動作が実現できているかを事前に確認することができる。(2) 聴覚インターフェースを利用した操作ガイド機能
宇宙ロボットを操作する場合、操作者はロボットの状態を示すテレメトリーを常に監視し、迅速に的確な判断を行うことが求められ、操作者の負担が非常に高くなる。本システムでは、このようなテレメトリーの状態の監視と実験の進行状況の監視をコンピュータにより行い、操作者に実験状況の一部を聴覚情報としても提示する機能を有している。視覚情報は非常に正確な情報伝達に有効であるのに対し、聴覚情報は特に意識を集中していなくても、可聴領域に入っていれば、情報伝達が可能であるという特徴を有している。そこで、本システムでは、適切な操作タイミングや特に注意が必要な情報について、視覚とともに聴覚インターフェースを介して提示することで操作性を上げる試みを行っている。(3) 運用関連文書・制御プログラム・操作補助音声データ等の一元管理及び自動生成
宇宙ロボットを運用するためには衛星や地球局など多くのシステムを利用するため、これらの制御を行うチームと適切に連携するために、多くの運用文書を用意する必要がある。これは不慮の事態に備えたオフノミナル対応も含めると膨大な量になる。また、先に述べた操作ガイド機能で実験状況に合わせて適切な指示を行うためには、実験シーケンスを実験者の意図を含めて、ガイド機能に理解させる必要がある。これらの情報は実験シーケンスと基本的に等価なため、実験のデザインをするときに実験シーケンスから自動的に生成することができれば、実験デザインを行ううえでの労力が軽減でき、情報の不整合等の事故を避けることができる。本システムは実験をデザインする簡易な言語から実験運用文書・制御プログラム・操作補助音声データ等を自動生成する機能を備えており、これらの情報を一元的に管理することができる。(4) マスターアームインターフェース
後述の予測バイラテラル制御実験で用いるマスターアームを接続し、力帰還制御に関する実験を行うことができる。
「アンテナ結合機構基礎実験」ではこれらの遠隔操作技術の実証も同時に行う。ここで実証される遠隔操作技術は、単にアンテナ組立だけでなく、宇宙ロボットの遠隔操作や地上での極限ロボット操作等に広く応用可能な技術である。
4. 実験の概要
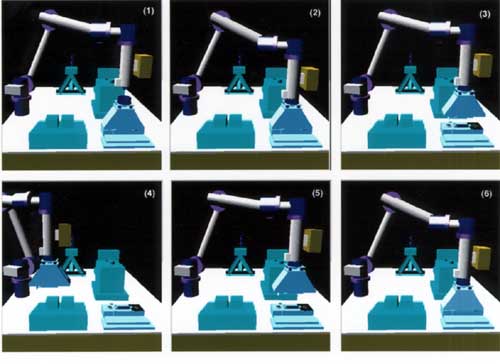
AAM実験は基本的に図4に示す様なシーケンスにより実施される。(1)先ずロボットの手先をAAM上方に移動し上述のターゲットマークを用いて把持位置を確認する。(2)グラプルフィクスチャーを把持する。(3)ラッチ機構を解除し「結合部」を「固定部」から分離する。(4)「結合部」を移動する。(5)「結合部」を「固定部」上方に移動させターゲットマークを用いて再結合位置を確認する。(6)「結合部」を「固定部」に再結合する。
軌道上実験では、この「基本実験シーケンス」を用いて、次にあげる5つの実験項目を順次実施してゆく予定である。
図4:基本実験シーケンス
(1)実験準備
ロボットアームのキャリブレーションや打ち上げ時の衝撃・振動等に耐えるために用いていた固定装置の解除(ロボットアームにより操作する)等を実施する。(2) 基本着脱実験
AAMの着脱シ-ケンスを、マニュアル操作を併用しながら行い、組立作業の操作性の評価、各種力学値の測定等を行う。(3) 全自動着脱実験
基本着脱実験の結果をもとに、基本着脱シ-ケンスを、画像処理による視覚誘導を利用し、マニュアル操作なしに実現する。(4) 結合可能範囲測定実験
結合時のロボットア-ムの先端位置を意図的に理想的な結合位置からずらして結合を行うことで、機械的なガイド機構の性能を評価する実験である。(5) 予測バイラテラル制御実験
予測バイラテラル制御とは、地上のコンピュ-タに軌道上のシステムのモデルを用意しておき、このモデルに基づいて計算された動作の予測によって作業をガイドする制御方法である。本実験では、予測バイラテラル制御をアンテナ組立作業に応用し、この制御方法の有効性を検証する。
5. 現在の運用状況と今後の予定
ETS-VIIは現在ロボットの機能確認を実施しており、ロボットの各関節や画像を取得するカメラ等の基本動作が正常であることが確認されつつある。今後さらに、ロボットの先端位置制御や力制御、対象物把持といったより高度で複雑な機能についての機能確認を順次行うことが予定されている。3月末にはCRLの初めての実験である「コマンドサクセスベリファイ実験」が予定されており、この実験において、遠隔操作システムの基本機能の確認や運用手順の確立、伝送時間遅れ・動作所要時間といった基本的なデータ取得等を行う予定である。また、アンテナ結合機構の分離再結合を伴う本格的な実験運用は、ロボットの機能確認の完了後、4月ごろから開始する予定になっている。
6. まとめ
ここでは「ETS-VIIにおけるアンテナ結合機構実験」について、その実験の概要と実験機器の開発状況について報告してきた。ETS-VIIは世界初の無人ロボット衛星であり、この貴重な実験機会を最大限に活用して、関係各方面と協力の上、有意義な実験となるよう努力して行きたい。

光技術部 光情報処理研究室長
この会議は、通信総合研究所の主催により、科技庁所管のJISTECと通総研のCOEプロジェクトからの財政的な援助を得て、信学会ES、応物学会、IEEE-LEOSおよびOSAの協賛によって開催された。全体会議講演、招待講演、に加えてポスターセッションを設け、一般投稿を募ったが、海外からも10件の投稿論文が寄せられた。公的資金に支えられた結果、準備期間が実質半年程度に制約されるなど難かしさはあったものの、出席者には参加登録費をお願いした点も含めて、可能な限り通常の国際学術会議に近いものとなるよう、企画運営が工夫された。
小規模な会議の中で光技術に関する最先端の研究動向を窺うことが出来た点で、準備期間が短かった割には注目を集め、会議は盛会であった。有意義であったといえる。今後どの様に活動を継承するかが検討課題である。
関東支所 宇宙電波応用研究室長
平成10年2月2日に通信総合研究所で初めての高度地理情報システム(GIS: Geographic Information System)ワ-クショップが鹿島宇宙通信センタ-で開催されました。GISは、防災対策、環境保護、行政や経済活動、福祉などの国民生活に密着する分野、学術研究など広範な応用が期待され、通信総合研究所の新たな研究分野として注目されています。
ワ-クショップ会場となった鹿島宇宙通信センタ-研究本館大会議室には、産・学・官それぞれの関係者約70名が集まりました。主な参加者は、企業、公共団体、大学、行政機関、そして通信総合研究所の研究者です。
ワ-クショップは、GISに関する日本の理論的支柱の一人でもある福井慶応大学助教授による基調講演を皮切りにスタ-トしました。基調講演では、欧米やアジア周辺諸国のGIS進展状況、情報通信技術との接点、社会基盤としての空間情報の位置づけ、GIS周辺技術の標準化に関する課題など、興味深い話の連続でした。
次に、我が国の行政の立場から国土庁、建設省、郵政省、各省庁に於けるGIS行政施策状況がそれぞれの担当官から報告されました。郵政省通信政策局宇宙通信政策課の担当官は、「地理情報システムに関する郵政省の取組み」と題し、GISの果たす役割りやGIS構築による経済効果予測を基にした郵政省の取組方針、情報ネットワ-クの構築やGIS実現に必要な法律整備など、具体例を挙げて現状が紹介されました。
一方、民間企業を代表する立場からの提言として、国土空間デ-タ基盤推進協議会(石原信雄会長)が「民間から見た国土空間デ-タ基盤」と題し、同協議会の活動状況、産・学・官連携に対する様々な要求や役割分担の提案、そして現状での技術的課題等が示されました。
通信総合研究所からは、情報通信技術・宇宙測地技術・リモ-トセンシングなどの先端的研究とGISとを結びつけた新たな研究分野の創出を目指す研究者が6件の研究発表を行いました。それらの概要は、GISとインタ-ネットを結合して可能となる携帯型パソコンに対するIPアドレス割り当ての提案、過密都市内での効率的な衛星通信を実現するためにGISを取り込んだ研究、情報処理技術を基点としたデ-タベ-スの高度利用とGISとの関連研究、VLBIに代表される宇宙測位技術とGISとをリンクさせたAPPS開発計画(APPS: Advanced Precise Positioning System)提案、道路交通と情報通信とを組み合わせた自動車の自動走行にGISを取り入れた最新研究、GISを仲介とした将来の自然科学や社会科学研究推進提案などが示されました。
このあと、「国立研究機関に期待するもの」と題し、通信総合研究所が果たす役割りに関する総合討論がおこなわれました。そのなかで、国土空間デ-タ基盤推進協議会関係者や多くの企業関係者から、APPS計画の推進や、大量のデ-タ伝送を効率的に行うための研究推進を期待するなどの意見が出されました。福井助教授からは、タ-ゲ-ットを明確にして各要素技術を順次完成させることがブレ-クスル-につながるので、通信総合研究所はGISのテストベッドとしての研究開発をぜひ推進して欲しいとのまとめの発言がなされました。
今回のワ-クショップは、我が国における情報通信とGISとの関連性についての現状認識理解や、大学・産業界などが国立研究機関に求める研究課題指針を示すものとなりました。今後の通信総合研究所に於けるGIS研究推進に大いに貢献するワ-クショップであったと思われます。
企画部
2月16日、当所の無線通信研究部門を集約した「横須賀無線通信研究センター」(YRC)の開所式が、神奈川県横須賀市の横須賀リサーチパーク(YRP)において開催されました。YRCは昨年7月15日付で組織上の発足を見、東京都小金井市の本所内において移転準備を進めていましたが、このたび、第1陣として第2・第4研究チームと企画管理室が横須賀に移転し、現地において本格的に活動を開始したものです。
開所式では、まず古濱洋治所長がYRCの3つの基本方針について表明しました。続いて来賓として、森永規彦大阪大学教授、平出賢吉NTT移動通信網(株)取締役(YRP推進担当)、ラーシュ・ボーマン日本エリクソン(株)副社長から、それぞれYRCに寄せる期待を込めた挨拶がありました。そして挨拶の最後として沢田秀男横須賀市長から、YRPの地に与えられた「光の丘」の地名についてユーモアを交えた解説がありました。式典の最後に、YRCのロゴパネルの除幕式が行われ、海をイメージするブルーの3本線をあしらったYRCのロゴマークが出席者に披露されました。
続いて行われた祝賀会では、甕昭男郵政大臣官房技術総括審議官の挨拶のあと、YRPのディベロッパーである京浜急行電鉄(株)の小谷昌社長による乾杯発声が行われ、約150名の出席者が歓談しました。
YRCは今後、横須賀での研究活動を本格化し、現在本所内に残っている無線伝送研究室、電磁環境研究室、通信デバイス研究室も順次横須賀に移転する計画です。
企画部 広報係
実際にご覧いただいた項目は、国際ネットワーク実験(GIBN、APII、APANプロジェクト)、光通信技術実験室、熱帯降雨観測衛星(TRMM)の3つで、この内、国際ネットワーク実験のスタジオでは、APIIのデモとして、シンガポールとの間で簡単なTV会議を設定し、現地との会話を楽しんでいただきました。
短時間の御来所で慌ただしいスケジュールでしたが、CRLの歓迎ぶりに満足してお帰りいただいたものと思われます。準備や見学を担当された皆様、ご協力ありがとうございました。
写真 :シンガポール大臣御視察風景
通信総合研究所では、
なお、本分野における通信総合研究所の取り組みについても併せて紹介致します。
また、講演会に関する情報はインターネット(http://www.crl.go.jp/kk/kouen/)にも掲載していますのでご覧ください。
お問い合わせは企画課広報係 Tel:0423-27-7465、e-mail: publicity@crl.go.jpへどうぞ。
井筒 雅之


本年、1月12日より3日間、東京有楽町の東京国際フォーラムにおいて、International Topical Workshop on Contemporary Photonic Technologies(CPT'98)が開催された。これからの光技術の進むべき方向を探るべく計画されたもので、東大・神谷教授、スタンフォード大・Miller教授を委員長とする会議委員会が中心となって実行した。初日のプレーナリセッション(全体会議)、2日目のポスターセッション、および6つの技術セッション(光スイッチングとインターコネクト、伝達システム、イメージングと計測、テラヘルツとフェムト秒、量子フォトニクス、デバイス技術)の、全部で8つのセッションと懇親会が行われ、参加登録者216名(内、海外からは20名)、発表数はポスター63件を含めて計90件である。
栗原 則幸
滝澤 修

YRC開所式で披露されたロゴマーク 方針表明をする古濱所長
2月17日にシンガポールの運輸通信大臣マー・ボー・タン氏一行が当所を御視察されました。外国のVIPをお迎えするのは12月の独バイエルン州首相一行に続いてということになり、今回も玄関ホールにはシンガポール国旗を用意し、また大会議室にも卓上用の国旗セットで歓迎の意を表しました。

(左から2人目がマー・ボー・タン大臣)
平成10年度の科学技術週間行事として、
以下のとおり講演会を開催することとなりましたのでお知らせ致します。
今回の講演会では
日本におけるインターネットの第一人者である
村井先生を
講演者に迎え、
インターネットの将来展望等について御講演いただきます。
多数のご参加をお待ち申しあげます。
もはや「インターネット」という言葉は、知らない人はほとんどいないといっても過言でない程、我々にとって身近な存在となりました。 インターネットは、通信、情報、コンピュータ、芸術、経済、法律、教育、医療、政治などのあらゆる分野での新しいステップに大きな可能性をもたらしますが、その実現にはそれぞれの分野で解決すべき課題も多く残されています。情報や知識を数値で表すディジタル情報、その情報を共有し交換するためのディジタルコミュニケーションのテクノロジー。そして、それらを利用した社会の発展。 こうして迎える「インターネット社会」への期待と課題について考えていきます。