


2003年より、光学望遠鏡を用いた静止衛星の観測装置の開発、静止衛星位置測定ソフトウェアの開発に取り組む。
赤道上空36000km の人工衛星は、地球の自転と同じ周期で地球の周りを回っているため、地球上からは静止しているように 見えます(図1)。このため、静止衛星と呼ばれ、地上との通信・放送に有効に活用できることから、世界各国で数多く 利用されています。しかし、こうした静止衛星の軌道位置は限られており、また、衛星間同士の電波の混信・干渉を防ぐ 必要もあり、「設定された位置から±0.1度を超えないこと」という国際電気通信連合(ITU)の取り決めがあります。
こうしたことから、静止軌道上にある衛星から発射される電波の質や、軌道位置を監視する必要があり、鹿島宇宙通信研究 センターでは衛星位置を測定する技術の研究開発を行ってきました。本稿では光学望遠鏡を用いた静止衛星軌道位置の 測定技術について紹介します。
静止衛星の方向探知は電波を用いていましたが、衛星の方向を示す方位角/仰角情報に含まれる大気の効果を補正する有効な 方法がなく、人工衛星の絶対的な方向を高い精度で探知することは難しい状況でした。それに対して、光学望遠鏡を用いた 静止衛星の位置測定は、静止衛星からの太陽反射光も同様に位置基準となる恒星からの光も同じ量だけ大気の影響を受ける ことになるので、大気の影響を考える必要がありません。
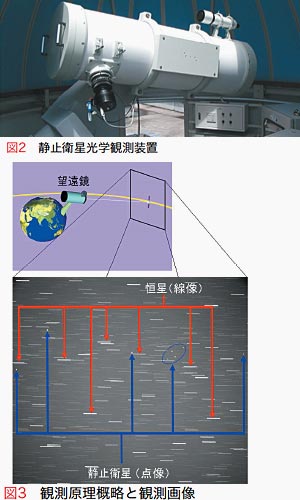
観測は、目標とする静止衛星方向に望遠鏡を向け、写真カメラのように設定時刻にシャッターを開放します。すると、地球の 日周運動により恒星は動いて"線"状に写りますが、静止衛星は見かけ上動かず"点"状に写ります。恒星は長年の天体観測から その位置が正確に分かっているので、その恒星を基準とする座標系で静止衛星位置を特定できます。こうした天文観測で 使われる恒星の位置カタログと、観測画像をマッチングさせるソフトウェアを新たに開発しました。
望遠鏡の駆動はモータとギアで行うため、その機械的誤差が生じてしまいます。また、モータ制御も機械的誤差に対応 できなかったため、当初はその誤差が最大で1度を超えていました。現在は、そうした機械的誤差を0.02度程度に抑えることが できるようになり、衛星の位置も自動計測できるようになりました。さらに開発したソフトウェア上で、あらかじめ設定した 衛星予測方向と、望遠鏡の指向方向のずれを入力して補正することにより、0.01度の精度で望遠鏡の指向方向を推定できる ようになりました。
望遠鏡を設置した鹿島宇宙通信研究センターの立地条件は、海岸に近いため潮風や細かい砂埃があり、一晩中観測するには、 不利な環境条件下にあります。そのため望遠鏡を2台用意し、運用と保守を交互に行い、信頼性向上に努めています。一見 ぜいたくに見えますが、頑丈な設備を1台作るのに比べれば、少ないトータルコストで同じ信頼度を達成しました。
海岸の近くでは大気の揺らぎのために、恒星や衛星の像が乱れるという悪影響もあります。実はこの点が、観測場所選定時に 最も懸念されました。しかし、実際の観測結果から、軌道の監視という目的であれば十分要求精度を満たしていることを 確認しました。むしろ、設備がすぐそばにあれば問題が起きてもすぐ対処できるので、いろいろな観測を試みることが可能に なり、研究面での作業能率も上がりました。
最近「光害」という言葉が頻繁に使われています。鹿島宇宙通信研究センター周辺も夜間照明を使う施設等が増え、外灯や サーチライトの影響、時には飛行している航空機の安全灯が写ってしまうということもあります。さらに、望遠鏡に取付けた 冷却CCDが検出してしまう望遠鏡周囲の物体が放射する赤外線、きわめて稀なケースではありますが宇宙線なども写ってしまう 可能性があります。こうしたさまざまな環境下で、2台の望遠鏡を用いた一晩連続観測を行い、同時に同じ静止衛星を測定 評価した結果、衛星の軌道位置測定精度0.001度達成を確認しました。
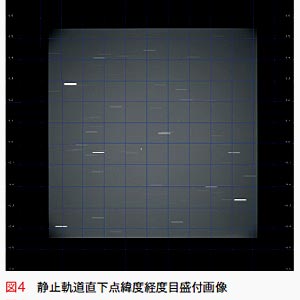
さて図4を見てください。写真の中身は図3と同様ですが、縦横にグリッド線があります。このグリッド線は、静止衛星の 軌道位置を世界地図に投影したときの緯度・経度を表しています。これによって静止衛星の現在位置が直読できます。 このようにデータを使いやすい形に加工できることが、世界でも例のない当センターでの光学観測法の最大の特徴と言えます。 加工済みの写真データは、増加傾向が続く衛星の混雑問題(電波監視行政・衛星管制事業者運用)を回避することに利用 され始めました。
光学観測装置の開発開始から8年余り経ちましたが、装置の機械精度や環境耐性についてはなお一層の改良の余地があり、 大量の写真データに対する処理時間もまだ短縮できる可能性があります。今後は、検知した衛星に自動的に軌道要素を 与えたり、衛星の接近警報をだす、といった形で観測データをさらに役立てるシステム開発をめざしていきます。例えば、 Web上で「3日後までに30km以内まで接近する衛星」と入力しただけで、対象衛星が瞬時に特定できるようなツール開発を 検討しています。静止軌道の衝突情報を高精度に管理し、それらの情報を必要に応じてリアルタイムで公開可能な データベース構築を夢見ています。

