


これでやっと家に帰れる...と。 苦闘の管制指令室での追跡管制系とミッション系の皆様の記念写真です。向かって一番左が筆者。

「成層圏プラットフォーム」は、高度20km付近の成層圏に長期間滞空する 大型無人飛行船を使った通信・放送や地球観測等の「拠点」です(図1)。 例えば通信・放送に用いた場合には、高さ20km の鉄塔の上に中継アンテナを置くのと同じで、 広いサービスエリアが確保できるうえに、人工衛星よりも通信距離が短いため弱い電波でも届き、 小型軽量で簡易なアンテナや通信機でも通信が可能になります。
三鷹成層圏プラットフォームリサーチセンターでは、 このような成層圏プラットフォームに使用される飛行船の追跡管制技術の研究を行っています。
成層圏プラットフォーム飛行船には、通信・放送等のミッションの継続性を確保し、 運用効率を高めるために、無人運航かつ無補給で、数年間の滞空飛行を行うことが求められます。 したがって無補給で飛行を続けるためには、飛行のためのエネルギー源は ソーラーパワー(太陽電池)に頼らざるを得ません。 また、夜間のエネルギー源も必要となることから、再生型燃料電池と呼ばれる軽くて効率の良い電源を搭載して、 昼間は太陽電池でプロペラを回すとともに、余った電力で水を電気分解して酸素と水素として蓄え、 夜間にはそれらを反応させて燃料電池として電力を得るという最新技術を使用します。
ソーラーパワーを確保するためには、上空に雲があっては困ります。 また、飛行船は、機器搭載可能重量が大きく、一定の場所に長期間安定して浮かぶことができるという特長を有する反面、 気象状況、特に風の影響を受けやすく、雨や雪、場合によっては台風といった悪天候での飛行は困難です。 通常の用途の航空機であれば、このような場所を避けて飛行すれば良いのですが、 長期間定点滞空する成層圏プラットフォーム飛行船では、そのような手段がとれません。
ところが、高度10km付近のジェット気流のさらに上、高度20km付近の成層圏は、 雲ははるか下で雨も雪も降らず、風速も25m/s程度で安定しており、 成層圏プラットフォーム飛行船が滞空するには最適な高度なのです。 しかし、空気密度が地上の約1/15〜1/20 と小さいため、飛行に必要な浮力を得るためには、 体積を大きく、すなわち飛行船を大型(全長200m級)にする必要があります。 とはいえ、昔のツェッペリン飛行船は全長200m を超えていましたから、荒唐無稽な話ではありません。 我が国でも、宇宙航空研究開発機構(JAXA )とNICTが連携し、現代の最新技術を使って 成層圏プラットフォーム飛行船の実現に向けた研究開発を進めており、その一環として、 三鷹成層圏プラットフォームリサーチセンターが追跡管制技術の研究開発を担当しています。
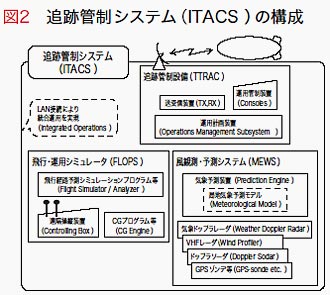
成層圏プラットフォーム飛行船の「追跡管制」とは、無人飛行船の位置や飛行状況を電波を使って地上で把握するとともに、 地上から電波で指令を送って飛行船を適切に制御する作業です。気象状況、特に風の影響を受けやすい飛行船の追跡管制を、 安全・確実かつ効率的に実施するためには、専用の追跡管制システムを開発する必要がありました。 このシステムは「ITACS(IntegratedTracking and Contorol System )」と呼ばれ、その構成を図2に示します。 ITACSは、次の3つのサブシステムで構成されています。

これらの設備は、平成14年度から順次、飛行試験が行われる北海道大樹実験場に整備され(図4)、 平成16年度の飛行試験「定点滞空飛行試験」に使用されました。

定点滞空飛行試験は、成層圏プラットフォーム飛行船の実験機である全長約70m の「定点滞空試験機」(図5)を、 搭載コンピュータによる自律飛行によって高度4kmの上空に定点滞空させ、 飛行船の飛行制御に関する技術を実証するとともに、通信・放送や地球観測のミッション機器を飛行船に搭載して、 これらのミッション試験を実施することを目的とした飛行試験で、JAXAとNICTの共同研究プロジェクトとして実施されました。
北海道大樹町の多目的航空公園周辺空域で実施された一連の飛行試験では、 ITACS の特徴である3つのサブシステムの連携運用により、 平成16年11月22 日に最終目標である高度4kmでの定点滞空実現と通信・放送ミッション試験の実施に成功しました。 成層圏プラットフォーム飛行船の実験機としては、世界初の偉業を達成したことになります。

図6は、ITACS による飛行制御を実施している飛行管制棟の直上、高度4kmで正確に定点滞空する飛行船を見上げた写真です。 厳しい気象条件の中、飛行試験機会を逃すことなく、このような高精度の飛行を計画どおりに実施できた背景には、 風観測・予測システム、飛行・運用シミュレータ、追跡管制設備の3サブシステムを一つに統合したITACS の存在がありました。
我が国の成層圏プラットフォームプロジェクトは、定点滞空飛行試験の成功により、 平成16年度の当初目標に対して充分満足できる成果が得られました。 今後は、これまでの研究開発の成果について評価を受け、今後の計画が検討・決定される段階に進みます。 NICTが培った成層圏プラットフォーム飛行船の追跡管制技術は、次の段階においても、 安全・確実な飛行を確保するために大いに役立つものと期待しています。

