インパルス型超広帯域無線(IR-UWB)を用いて
自律走行ロボット(AMR)を簡便に自律走行させるシステムの開発に成功
2025年6月17日
ポイント
-
高精度な距離計測が可能なIR-UWBを用いた自律走行ロボット(AMR)の簡便な自律走行システムを開発
-
事前の地図作成等が不要で、IR-UWB端末を目標地点とAMR上に置くだけで、連続自動走行が可能
-
クリーンルームでの環境計測等で、作業省力化や作業時間帯の柔軟性をサポート
国立研究開発法人情報通信研究機構(NICT、理事長: 徳田 英幸)と株式会社テクノ菱和(テクノ菱和、代表取締役社長執行役員: 加藤 雅也)は、インパルス型超広帯域無線(IR-UWB: Impulse Radio Ultra-Wideband)を用いて自律走行ロボット(AMR)を簡便に自律走行させるシステムの開発に成功しました。
高精度な距離計測が可能なIR-UWBを用いて開発した自律走行システムは、事前に対象エリアの地図作成と座標標定作業をすることなしに、複数の目標地点に置かれたポータブルなIR-UWB端末(目標端末)と、AMRに載せたIR-UWB端末(移動端末)との間でリアルタイムに距離計測を行い、連続自動走行を行います。
本技術が実用化されれば、クリーンルーム等における環境計測作業の省力化と作業時間帯柔軟性がもたらされ、低発塵環境での清浄度測定が可能になります。今後、計測、物流、建築などの分野におけるAMRの自律作業支援への応用も期待されます。
背景
クリーンルームでは気中微粒子濃度の測定を行いますが、人間からは微粒子が発生するため多人数で測定することができず、少人数で測定を行ったとしても清浄度に影響を与えてしまうため、AMRを用いた測定が望まれます。自律走行方式としてLiDAR(Light Detection And Ranging)センサとSLAM(Simultaneous Localization And Mapping)を組み合わせたシステムが主流ですが、クリーンルームにはステンレスなどの鏡面が室内に存在し、レーザーによる測距が誤作動するために使用することができず、磁気テープ及びカラーテープを床面に貼って誘導する自律走行方式も床を汚染するために使用できません。
上記の問題点を解決する方式として、今回はIR-UWBの高精度な距離計測の特長を利用して、自律走行システムを開発しました。
今回の成果
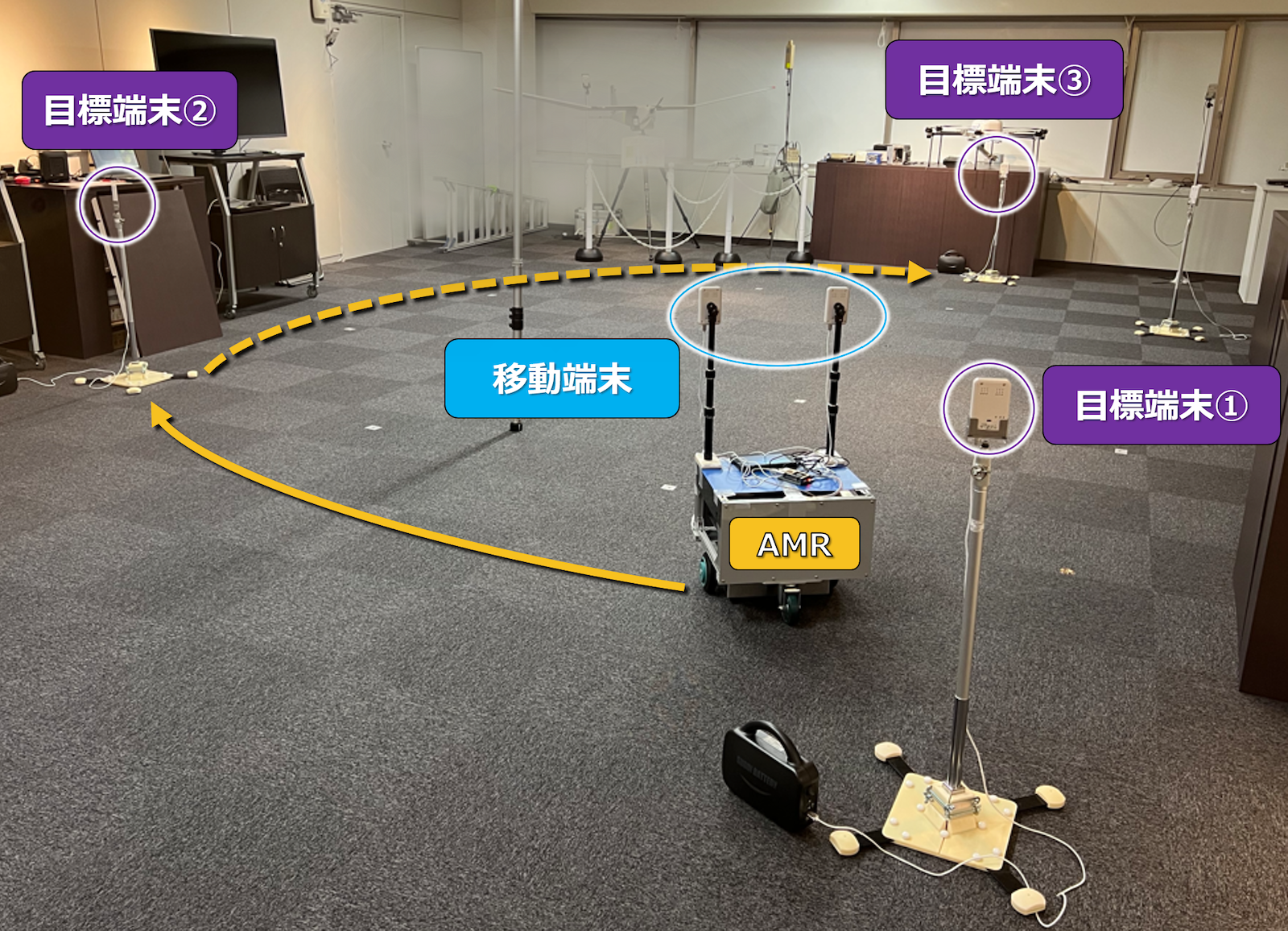
図1 AMR動作検証実験の様子
従来のIR-UWB測位システムは“3点測位”に基づいており(詳細は補足資料を参照)、AMR上のIR-UWB端末は3台以上のIR-UWB基準端末と送受信できるよう、対象エリアに複数台のIR-UWB基準端末を配置する必要がありました。さらに、全てのIR-UWB基準端末の座標標定と対象エリアの地図作成を事前に行わなければならず、これらの事前作業は効率性に欠けることが問題でした。
今回開発したIR-UWBを用いた自律走行システム(図1参照)は、事前の座標標定や地図作成が不要で、目標端末を置くだけで目標地点が設定され、移動端末を載せたAMRは各目標地点へ順に連続自動走行し、それぞれ20 cmの精度で指定範囲に辿り着きます(図2参照)。このシステムは、「AMRに置く2台の移動端末と目標地点の目標端末との二つの距離計測結果に基づいて目標地点までの距離と方向角を推定するアルゴリズム(NICTが開発)を用いた目標地点推定部」と「AMRの走行速度・加速度及び回転角速度・角加速度を考慮に入れた駆動制御アルゴリズム(テクノ菱和が開発)を用いたAMR駆動制御部」の連携で成立するもので、目標地点推定部とAMR駆動制御部の間でリアルタイムに制御データ等を通信して(詳細は補足資料を参照)、AMRは方向角をアップデートしながら走行します。
本自律走行システムをクリーンルームの気中微粒子濃度測定に使用する場合、測定点に目標端末を置くだけで自動測定が可能となります。これにより、測定時間を休憩時間や休日、夜間に設定可能となり、日中の作業時間には対象室に別の作業を割り当てることができます。さらに、クリーンルーム内では人間は大きな発塵源で、ロボットは静止状態の人間と比べても発塵量が顕著に少ないことから、より正確な清浄度測定が可能となり、作業効率向上と測定精度向上に貢献できます。
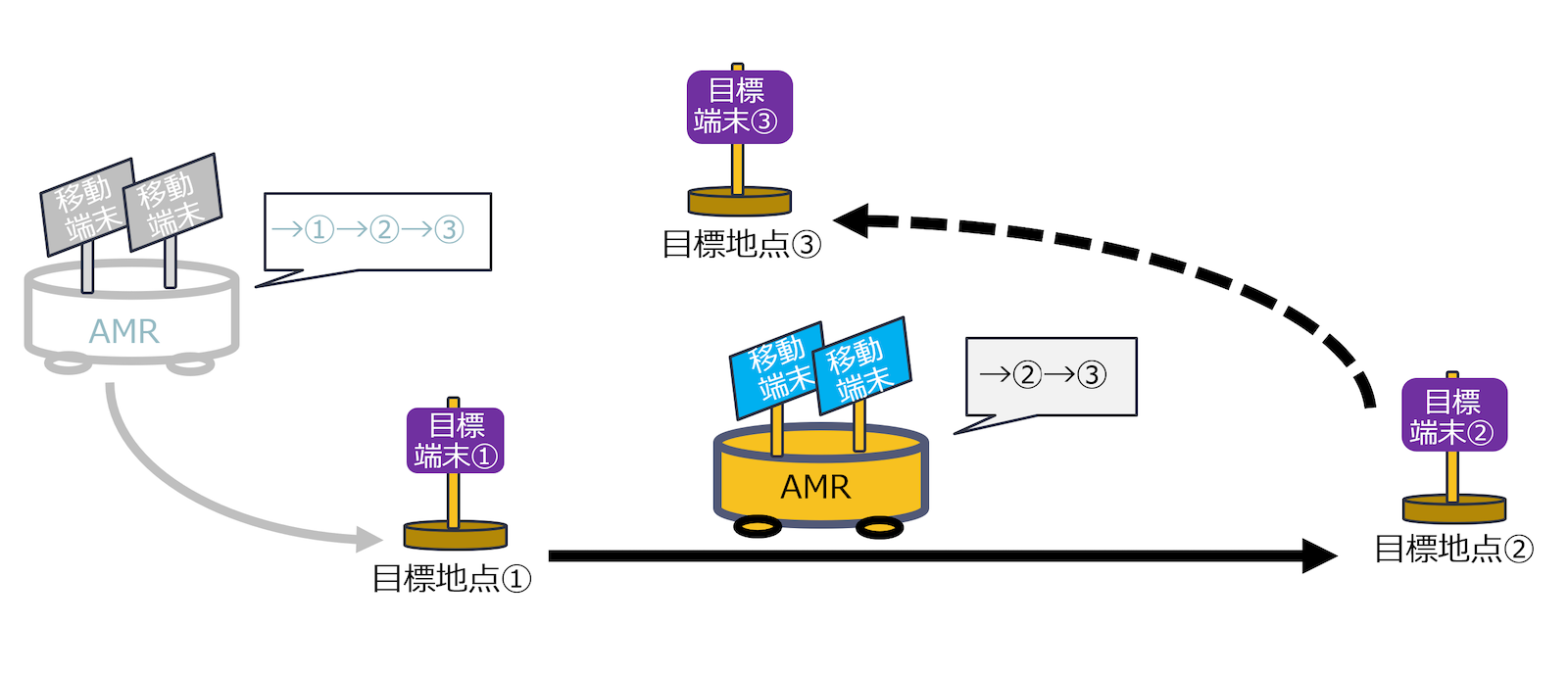
図2 AMRが複数の目標地点に連続で自律走行するイメージ図
今後の展望
本自律走行システムは、IR-UWBの距離計測に基づき目標地点推定部とAMR駆動制御部が情報交換しながらそれぞれ単独で制御を行っています。今後、CPUを統合することでこれら二つの制御を一体化し、システムの小型化と制御効率向上を目指します。開発したシステムは、システム計測、物流、建築などの分野における自動作業ロボットの自律作業支援への応用が期待されます。
なお、本自律走行システムは、『NICTオープンハウス2025』(6月20、21日開催)に出展する予定です。
関連する過去のNICTの報道発表
- 2015年8月10日 UWB測位システムを使い、物流倉庫作業を大幅に効率化
https://www.nict.go.jp/press/2015/08/10-1.html - 2014年5月26日 UWBを利用した高精度の屋内測位システムを開発
https://www.nict.go.jp/press/2014/05/26-1.html
参考動画
- 超広域帯無線(UWB)の研究開発
https://youtu.be/v2LrvPpJEzY?si=AEGZznnrS-xijHO1
補足資料
測位の仕組みについて
無線による測位で地図情報が必要になるのは、3点測位の使用方法に起因します。3点測位というのは既知の場所3ヶ所に設置された基準端末から対象物(移動端末)までの距離を測定することで、対象物の位置を測位する方法です(図3参照)。
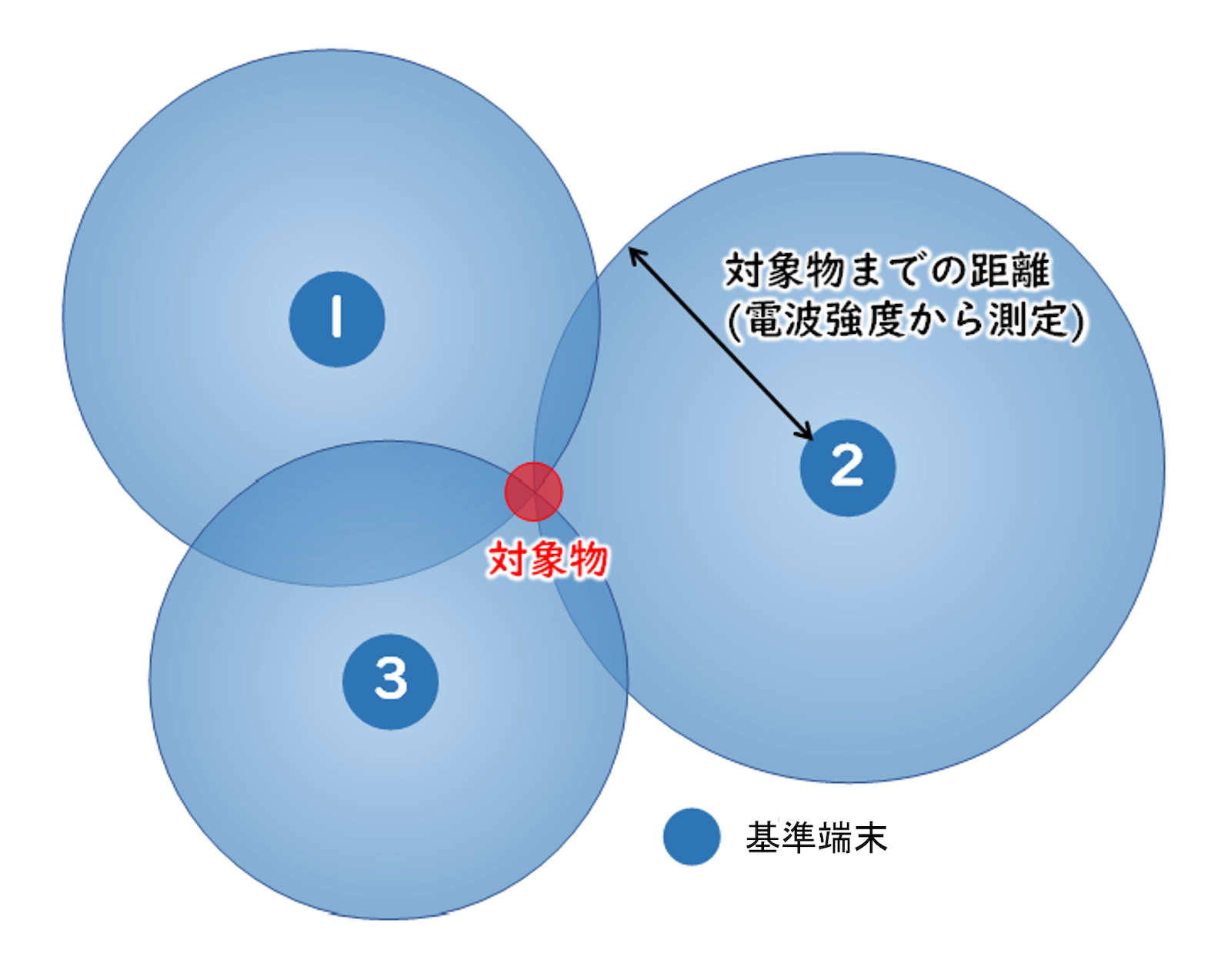
図3 3点測位の原理
3点測位では3台以上の基準端末を用いて移動する対象物を測位する方法が一般的ですが、対象空間の地図及び基準端末の座標標定を事前に行う必要があります。
今回開発した自律走行システム(図4参照)では、AMRに2台の移動端末を載せ、その間の距離(d)と回転中心からの鉛直距離(h)、そして目標地点の目標端末との距離(r1、r2)を用いて目標地点の方向角(θ)と距離(R)を計算します。したがって、事前情報として必要になるのはAMRに載せる2台の移動端末間の距離(d)と回転中心からの鉛直距離(h)のみで、対象空間の地図も基準端末も要りません。
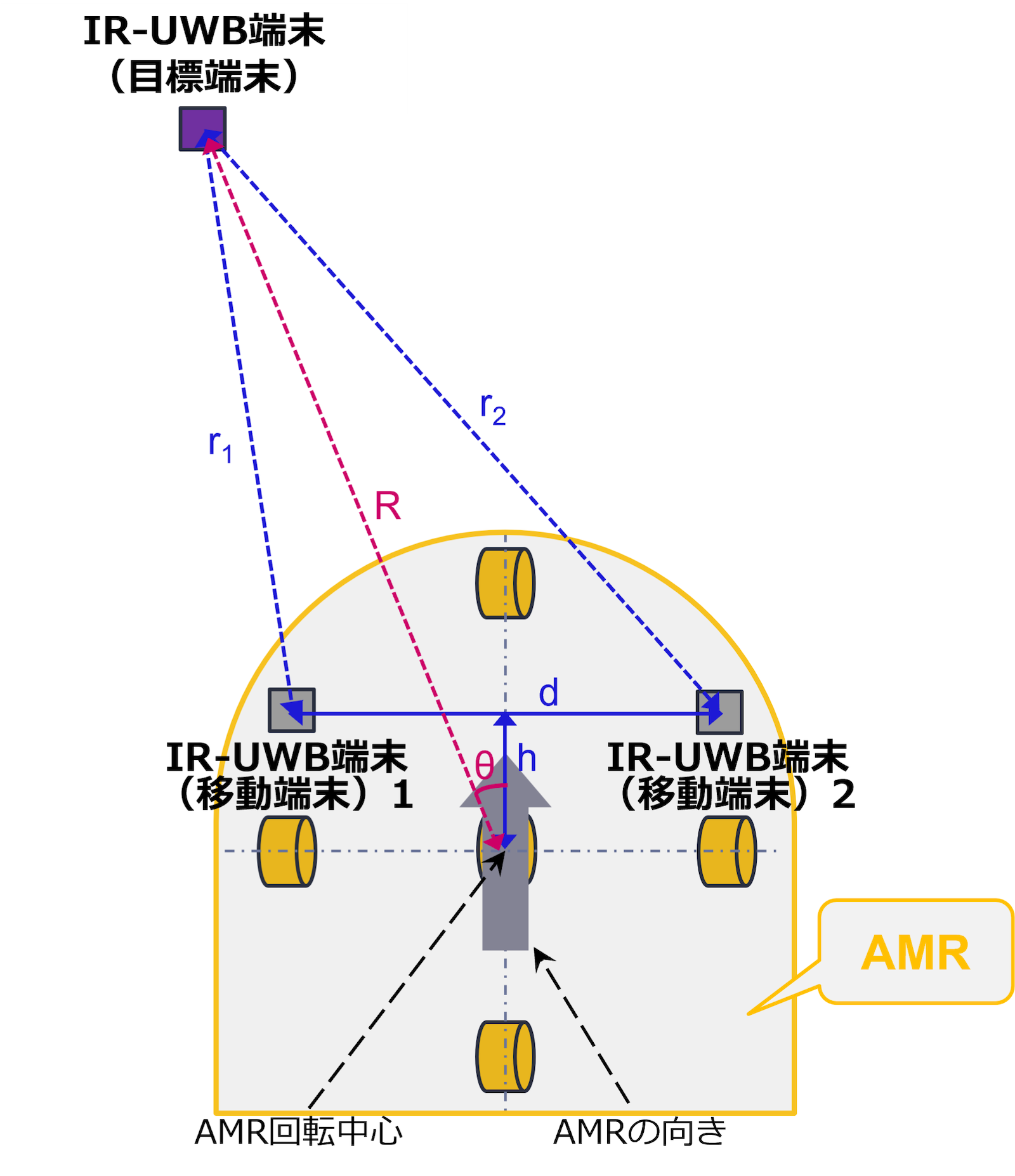
図4 本システムでは目標端末に対する距離計測結果から方向角と距離を計算
開発した自律走行システムについて
今回開発した自律走行システムは、IR-UWB距離計測に基づく目標地点推定部(NICTが開発担当)と、AMR駆動制御部(テクノ菱和が開発担当)から構成されます。前者は、AMR回転中心から目標地点に置いた目標端末までの距離と方向角を推定し、結果を後者に送ります。後者は、AMRの駆動走行結果を前者に送ります。この通信はリアルタイムで行われ、AMRの走行と同時に方向角を継続的にアップデートしていきます。本システムには、AMRに載せた2台の移動端末と、目標地点に置いた1台の目標端末との計測距離に基づくアダプティブ送信電力制御を実装しており、マルチパス伝播による影響を低減できます。また、FIR(Finite Impulse Response)フィルタの実装により移動平均することで、走行方向角度のばらつきを軽減します。
図1は、自律走行システムの動作検証を行った代表的なセッティング例です。ここでは、オフィスルーム内に目標地点を示す目標端末を1台ずつ置き、事前に設定した順序でAMRを目標地点へ連続走行させます。走行順序は図5に示すGUI上で目標端末(Anchor)を選ぶことで設定され、最大32台まで設定可能です。AMRは、一つの目標地点に到着すると事前設定した時間滞留し、その後、現在の目標地点の目標端末に対して退避動作を行い、次の目標地点へ走行します。走行予定ルート上に現在の目標端末が存在すると判断した場合は、再度退避動作を行います。
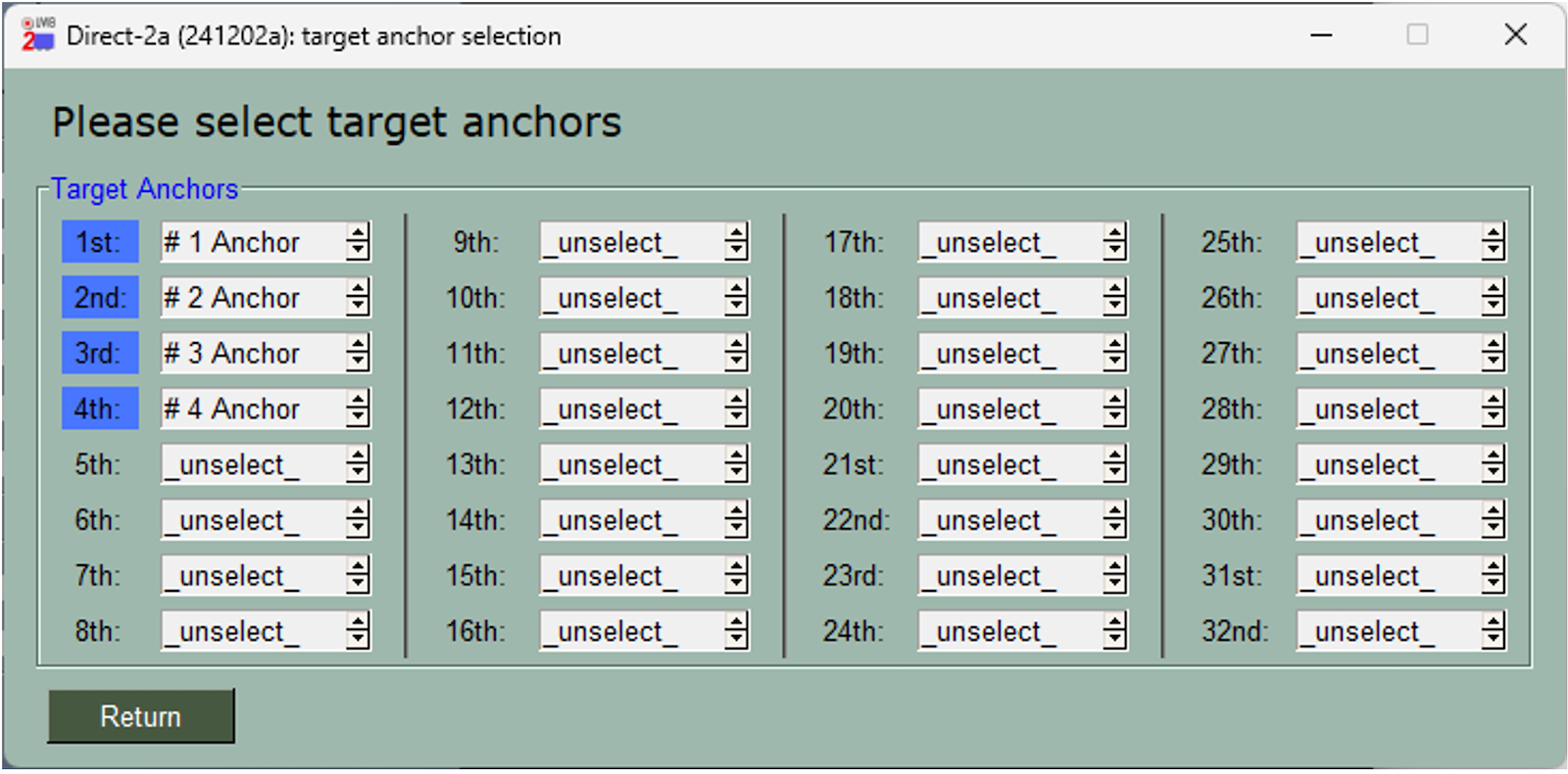
図5 自律走行の順序を指定するGUI
自律走行検証実験では、走行順序パターンをいろいろ変えながら実施しました。オフィス内環境及び廊下で、目標地点の目標端末に対して最大14メートル離れた地点からAMRを走行させ、事前指定した目標地点の目標端末の到達範囲に対して、20 cmの精度で近づけたことを確認しました。
用語解説
インパルス型超広帯域無線(IR-UWB: Impulse Radio Ultra-Wideband) 時間幅が1ナノ秒オーダーのパルスを用いた、周波数帯域幅が500 MHz以上を有する超広帯域無線信号及び無線通信方式を指す。法制度の規定により、送信放射電力密度が-41.3 dBm/MHz以下でなければならない。 元の記事へ
自律走行ロボット(AMR: Autonomous Mobile Robot) 従来の走行ロボットはあらかじめ決められたルートのみを走行するのに対して、自律走行ロボット(AMR)は、周辺環境に合わせて自動で走行ルートを算出して、周辺環境変化に柔軟に対応できる。 元の記事へ
高精度な距離計測が可能なIR-UWB IR-UWBを用いた距離計測は、2台のIR-UWB端末の間(今回は移動端末と目標端末の間)で送受信を行い、それぞれのIR-UWB端末が送受信したパルスの送信時刻と受信時刻からパルスの伝搬時間を求め、IR-UWB端末間の距離を計算する。他の無線通信方式に比べて、IR-UWBが用いたパルスの幅は極めて短く、1ナノ秒オーダーのため、高い精度で距離計測できる。 元の記事へ
清浄度測定 クリーンルームの清浄度を評価するため、気中微粒子濃度を測定することを指す。測定した微粒子濃度が設計値に適合しているかを確認するための作業である。 元の記事へ
本件に関する問合せ先
国立研究開発法人情報通信研究機構
ネットワーク研究所
ワイヤレスネットワーク研究センター
ワイヤレスシステム研究室
李 還幇、松村 武
E-mail: wsl-info ml.nict.go.jp
ml.nict.go.jp
ml.nict.go.jp株式会社テクノ菱和
技術開発研究所
滝口 陽介、唐木 千岳
E-mail: info-labtechno-ryowa.co.jp
techno-ryowa.co.jp広報(取材受付)
国立研究開発法人情報通信研究機構
広報部 報道室
E-mail: publicitynict.go.jp
nict.go.jp